Разделы 
Дополнительно
Задача по физике - 16386
2024-03-16 
Когда вдоль поверхности земли начал дуть ветер со скоростью $u$, математический маятник с длиной подвеса $L$ отклонился на угол $\phi_{0}$ от вертикали и стал совершать малые колебания около этого положения. Определить частоту этих колебаний с учетом затухания, если силу сопротивления, испытываемую телом, движущимся в неподвижном воздухе, можно считать пропорциональной квадрату его скорости.
Решение:
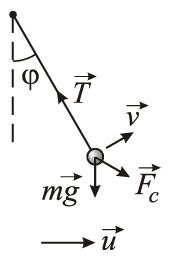
Будем характеризовать положение маятника углом $\phi$ отклонения от вертикали. Для получения уравнения движения маятника будем использовать основное уравнение динамики вращательного движения. По условию задачи сила сопротивления пропорциональна квадрату скорости, поэтому представим ее в виде
$\vec{F}_{c} = - \gamma | \vec{v} - \vec{u} | ( \vec{v} - \vec{u} )$, (1)
где $\gamma$ - коэффициент пропорциональности. Момент силы сопротивления $\vec{F}_{c}$ найдем как
$M_{c} = LF_{c} \sin ( \vec{L}, \vec{F}_{c}) = L F_{c} \cos( \vec{F}_{c}, \vec{v}) = L \frac{ \vec{F}_{c} \vec{v}}{| \vec{v} |} = - \gamma L \frac{ | \vec{v} - \vec{u} |}{ | \vec{v} |} ( v^{2} - \vec{u} \vec{v} ) = - \gamma L | \vec{v} - \vec{u} | (v - u \cos ( \vec{u}, \vec{v} )) = - \gamma L | \vec{v} - \vec{u} | (v - u \cos \phi) = - \gamma L (v - u \cos \phi ) \sqrt{ v^{2} + u^{2} -2vu \cos \phi }$.
Используя связь $v = \dot{ \phi}L$, можно записать
$M_{c} =- \gamma L ( \dot{ \phi} L - u \cos \phi ) \sqrt{ \dot{ \phi}^{2}L^{2} + u^{2} -2 \dot{ \phi}Lu \cos \phi}$. (2)
Момент силы тяжести $m \vec{g}$ имеет вид:
$M_{T} = - mgL \sin \phi$. (3)
Тогда уравнение движения маятника с учетом (2) и (3), и того, что момент инерции $I = mL^{2}$, можно записать:
$mL^{2} \ddot{ \phi} = M_{C} + M_{T} = \gamma L(u \cos \phi - \dot{ \phi}L) \sqrt{ \dot{ \phi}^{2}L^{2} + u^{2} - 2 \dot{ \phi}Lu \cos \phi} - mgL \sin \phi$,
или
$L \ddot{ \phi} = \frac{ \gamma}{m} ( u \cos \phi - \dot{ \phi}L) \sqrt{ \dot{ \phi}^{2}L^{2} + u^{2} - 2 \dot{ \phi} Lu \cos \phi} - g \sin \phi$. (4)
Для положения равновесия $\phi = \phi_{0}$ имеем $\dot{ \phi} = 0, \ddot{ \phi} = 0$, откуда
$tg \phi_{0} = \frac{ \gamma u^{2}}{mg}$ и $\gamma = \frac{mg}{u^{2}} tg \phi_{0}$. (5)
Возле положения равновесия $\phi_{0}$ маятник совершает малые колебания, значит $\phi = \phi_{0} + \beta$, где $\beta$ - малое отклонение. Линеаризуя выражение (4) по малому параметру $\beta$, получим:
$L \ddot{ \beta} = - \frac{ \gamma}{m} ( ul \dot{ \beta} (1 + \cos^{2} \phi_{0}) + u^{2} \sin \phi_{0} \beta ) - g \beta \cos \phi_{0}$,
или, подставляя (5), имеем:
$\ddot{ \beta} + \frac{g}{u} tg \phi_{0} (1 + \cos^{2} \phi_{0}) \dot{ \beta} + \frac{g}{L \cos \phi_{0}} = 0$. (6)
Получили уравнение колебаний вида:
$\ddot{ \beta} + 2 \delta \dot{ \beta} + \omega_{0}^{2} \beta = 0$. (7)
Из сравнения (6) и (7) получим:
$\delta = \frac{g}{2u} tg \phi_{0} (1 + \cos^{2} \phi_{0}), \omega_{0}^{2} = \frac{g}{L \cos \phi_{0}}$.
Тогда частота колебаний математического маятника с учетом затухания будет иметь вид:
$\nu = \frac{ \omega}{2 \pi} = \frac{ \sqrt{ \omega_{0}^{2} - \delta^{2} } }{2 \pi} = \frac{1}{2 \pi} \sqrt{ \frac{g}{L \cos \phi_{0}} - \frac{g^{2}}{4u^{2}} \phi_{0} (1 + \cos^{2} \phi_{0})^{2}}$.
Когда вдоль поверхности земли начал дуть ветер со скоростью $u$, математический маятник с длиной подвеса $L$ отклонился на угол $\phi_{0}$ от вертикали и стал совершать малые колебания около этого положения. Определить частоту этих колебаний с учетом затухания, если силу сопротивления, испытываемую телом, движущимся в неподвижном воздухе, можно считать пропорциональной квадрату его скорости.
Решение:
Будем характеризовать положение маятника углом $\phi$ отклонения от вертикали. Для получения уравнения движения маятника будем использовать основное уравнение динамики вращательного движения. По условию задачи сила сопротивления пропорциональна квадрату скорости, поэтому представим ее в виде
$\vec{F}_{c} = - \gamma | \vec{v} - \vec{u} | ( \vec{v} - \vec{u} )$, (1)
где $\gamma$ - коэффициент пропорциональности. Момент силы сопротивления $\vec{F}_{c}$ найдем как
$M_{c} = LF_{c} \sin ( \vec{L}, \vec{F}_{c}) = L F_{c} \cos( \vec{F}_{c}, \vec{v}) = L \frac{ \vec{F}_{c} \vec{v}}{| \vec{v} |} = - \gamma L \frac{ | \vec{v} - \vec{u} |}{ | \vec{v} |} ( v^{2} - \vec{u} \vec{v} ) = - \gamma L | \vec{v} - \vec{u} | (v - u \cos ( \vec{u}, \vec{v} )) = - \gamma L | \vec{v} - \vec{u} | (v - u \cos \phi) = - \gamma L (v - u \cos \phi ) \sqrt{ v^{2} + u^{2} -2vu \cos \phi }$.
Используя связь $v = \dot{ \phi}L$, можно записать
$M_{c} =- \gamma L ( \dot{ \phi} L - u \cos \phi ) \sqrt{ \dot{ \phi}^{2}L^{2} + u^{2} -2 \dot{ \phi}Lu \cos \phi}$. (2)
Момент силы тяжести $m \vec{g}$ имеет вид:
$M_{T} = - mgL \sin \phi$. (3)
Тогда уравнение движения маятника с учетом (2) и (3), и того, что момент инерции $I = mL^{2}$, можно записать:
$mL^{2} \ddot{ \phi} = M_{C} + M_{T} = \gamma L(u \cos \phi - \dot{ \phi}L) \sqrt{ \dot{ \phi}^{2}L^{2} + u^{2} - 2 \dot{ \phi}Lu \cos \phi} - mgL \sin \phi$,
или
$L \ddot{ \phi} = \frac{ \gamma}{m} ( u \cos \phi - \dot{ \phi}L) \sqrt{ \dot{ \phi}^{2}L^{2} + u^{2} - 2 \dot{ \phi} Lu \cos \phi} - g \sin \phi$. (4)
Для положения равновесия $\phi = \phi_{0}$ имеем $\dot{ \phi} = 0, \ddot{ \phi} = 0$, откуда
$tg \phi_{0} = \frac{ \gamma u^{2}}{mg}$ и $\gamma = \frac{mg}{u^{2}} tg \phi_{0}$. (5)
Возле положения равновесия $\phi_{0}$ маятник совершает малые колебания, значит $\phi = \phi_{0} + \beta$, где $\beta$ - малое отклонение. Линеаризуя выражение (4) по малому параметру $\beta$, получим:
$L \ddot{ \beta} = - \frac{ \gamma}{m} ( ul \dot{ \beta} (1 + \cos^{2} \phi_{0}) + u^{2} \sin \phi_{0} \beta ) - g \beta \cos \phi_{0}$,
или, подставляя (5), имеем:
$\ddot{ \beta} + \frac{g}{u} tg \phi_{0} (1 + \cos^{2} \phi_{0}) \dot{ \beta} + \frac{g}{L \cos \phi_{0}} = 0$. (6)
Получили уравнение колебаний вида:
$\ddot{ \beta} + 2 \delta \dot{ \beta} + \omega_{0}^{2} \beta = 0$. (7)
Из сравнения (6) и (7) получим:
$\delta = \frac{g}{2u} tg \phi_{0} (1 + \cos^{2} \phi_{0}), \omega_{0}^{2} = \frac{g}{L \cos \phi_{0}}$.
Тогда частота колебаний математического маятника с учетом затухания будет иметь вид:
$\nu = \frac{ \omega}{2 \pi} = \frac{ \sqrt{ \omega_{0}^{2} - \delta^{2} } }{2 \pi} = \frac{1}{2 \pi} \sqrt{ \frac{g}{L \cos \phi_{0}} - \frac{g^{2}}{4u^{2}} \phi_{0} (1 + \cos^{2} \phi_{0})^{2}}$.